



Pinces pneumatiques - Leur fonctionnement
Figure 1 : Préhenseurs pneumatiques
Une pince pneumatique est un dispositif de prise et de dépose qui utilise de l'air comprimé pour actionner les mâchoires de la pince, également appelées doigts. Ces doigts, semblables aux doigts humains, aident à saisir, à tenir et à relâcher les pièces à travailler. En général, ils ont 2 doigts (parallèles ou angulaires) ou 3 doigts avec un cylindre à simple ou double effet pour la commande. Ils sont principalement utilisés dans les processus de fabrication automatisés pour saisir une pièce. Les pièces à usiner peuvent aller de petits objets tels que des circuits imprimés ou des puces à de grands objets tels qu'un bloc moteur. La figure 1 montre des exemples de pinces pneumatiques à 2 doigts et à 3 doigts.
Table des matières
- Avantages des pinces pneumatiques
- Principe de fonctionnement des pinces pneumatiques
- Pince pneumatique à 2 doigts et 3 doigts
- Force de préhension
- Critères de sélection
- Applications
Consultez notre sélection en ligne de préhenseurs et de vérins pneumatiques !






Avantages des pinces pneumatiques
Les avantages des pinces pneumatiques sont les suivants
- Poids léger
- Rentabilité
- Force de préhension élevée
- Capacité à saisir diverses configurations de pièces à usiner
- Force de préhension réglable
Principe de fonctionnement des pinces pneumatiques
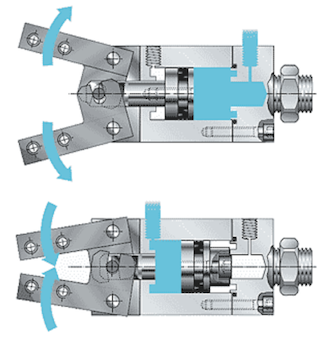
Figure 2 : Principe de fonctionnement d'une pince angulaire pneumatique à 2 doigts
La pince est reliée au système d'alimentation en air comprimé. Lorsque l'air comprimé est introduit dans le cylindre, il actionne la tige du piston. La tige de piston est reliée aux doigts de préhension. Lorsque la pression de l'air fait monter ou descendre le piston, les doigts s'ouvrent ou se ferment de manière parallèle ou angulaire. Ce mécanisme peut être utilisé pour les opérations de prise et de dépose ou pour modifier l'orientation de l'objet.
La figure 2 montre le principe de fonctionnement d'une pince angulaire pneumatique à deux doigts. Il s'agit d'une conception à double cylindre. Par conséquent, lorsque de l'air comprimé est connecté au cylindre arrière (figure 2 en haut), il pousse le piston vers l'avant, ce qui ouvre les doigts de la pince pneumatique. Lorsque de l'air comprimé est connecté au cylindre avant (figure 2 en bas), il pousse le piston vers l'arrière, ce qui ferme les doigts de la pince pneumatique.
Les pinces pneumatiques peuvent être classées en fonction du mouvement des doigts de préhension, du mécanisme de préhension et des configurations. Les plus courantes sont présentées ci-dessous :
Pince parallèle
Comme son nom l'indique, la pince parallèle déplace ses doigts parallèlement au corps de la pince. Le type de pince parallèle est le plus couramment utilisé car les pinces personnalisées sont faciles à concevoir et l'installation est aisée car il n'y a qu'un seul axe de mouvement. Ils peuvent également traiter des pièces de formes et de tailles très variées et s'adapter aux variations dimensionnelles. La figure 3 montre le mouvement des doigts.
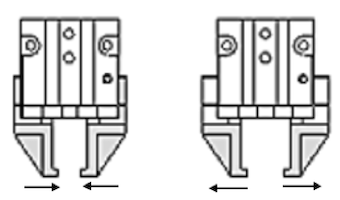
Figure 3 : Pinces parallèles pneumatiques fermant (à gauche) et ouvrant (à droite)
Pince angulaire
La pince angulaire pneumatique peut déplacer ses doigts de manière radiale, en s'ouvrant et en se fermant autour d'un point de pivot central. Ils sont souvent utilisés dans des applications où l'espace disponible est limité, car les mâchoires peuvent se déplacer vers le haut et hors du chemin. Ces pinces sont idéales pour maintenir des pièces de grande taille et de forme irrégulière. La figure 2 illustre le mouvement des doigts.
Pince pneumatique à 2 doigts et 3 doigts
Les pinces pneumatiques à 2 doigts sont les plus couramment utilisées. Il offre deux emplacements de montage pour les doigts. Les doigts se déplacent de manière synchrone, s'ouvrant et se fermant vers l'axe central de la pince.
Les pinces à 3 doigts sont idéales pour manipuler des objets ronds et offrent une plus grande force de préhension que les pinces à 2 doigts. Il offre trois emplacements de montage pour les doigts. Les doigts s'ouvrent et se ferment vers l'axe central du corps de la pince. Les 3 doigts offrent un meilleur soutien et un centrage plus précis que les pinces à 2 doigts.
Préhension externe et interne
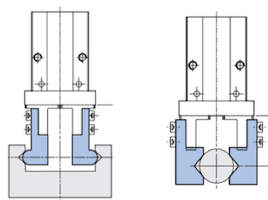
Figure 4 : Types de préhenseurs pneumatiques en fonction du mécanisme de préhension : préhension interne (à gauche) et préhension externe (à droite)
En fonction du type de préhension, les pinces pneumatiques peuvent être classées comme internes, externes ou combinées. Des exemples sont présentés ci-dessous et illustrés par la figure 4.
- Préhension interne : Les pinces internes utilisent la force d'ouverture pour maintenir la pièce et saisissent l'objet par sa surface interne.
- Préhension externe : Les pinces externes utilisent la force de fermeture pour maintenir la pièce et saisir l'objet à partir de la surface extérieure. Il s'agit du mécanisme de préhension le plus courant.
- Préhension combinée : Utilise une combinaison de préhension externe et interne.
Préhenseurs à simple et double effet
Les pinces pneumatiques peuvent avoir une configuration à simple ou double effet. Les pinces pneumatiques à simple effet contiennent un ressort pour faciliter l'entraînement dans une seule direction (soit l'ouverture, soit la fermeture).
Les pinces pneumatiques sont généralement conçues pour être à double effet. Ils peuvent être actionnés par de l'air comprimé pour s'ouvrir et se fermer. Cette caractéristique permet un serrage interne et externe. Les pinces à double effet peuvent être dotées d'une fonction d'assistance par ressort pour maintenir la pièce en cas de perte de pression d'air.
Pince magnétique
Les pinces magnétiques conviennent à la manipulation d'objets ferromagnétiques. Les pinces sont équipées d'aimants permanents en leur centre. Selon la force de l'aimant, il peut être utilisé pour manipuler des objets de différentes tailles. Toutefois, il est important de noter que les aimants permanents ont tendance à perdre leurs propriétés magnétiques à des températures plus élevées (supérieures à 150°C).
Forme des doigts
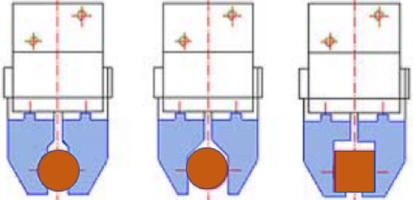
Figure 5 : Forme des doigts pour les préhenseurs pneumatiques : englobant (à gauche), friction (au milieu), rétention (à droite)
En général, les doigts d'un préhenseur pneumatique utilisent la friction pour la force de préhension. Mais ces doigts peuvent également être conçus de manière alternative pour réduire la taille et la force de préhension requises pour l'application. La forme englobante et la forme de rétention augmentent la stabilité et réduisent la force requise pour la prise. La figure 5 montre quelques exemples courants de différentes formes de doigts.
Répétabilité
La répétabilité est la mesure de la précision maximale de la position que la pince peut atteindre. Les pinces pneumatiques peuvent avoir une répétabilité différente en fonction du nombre de doigts et de la vitesse de fonctionnement. La répétabilité doit donc être déterminée en fonction de la précision requise pour l'application.
Force de préhension
La force de préhension est la force exercée par les doigts de la pince sur la pièce. Cette force peut varier en fonction de la pression de l'air, du coefficient de frottement et des conditions de préhension entre les doigts et la pièce. La force de préhension pour un maintien par simple friction, lorsque la pièce ne tombe pas lorsqu'elle est saisie, est calculée comme suit :

Où ?
- F = Force de préhension d'un seul doigt (N)
- m = Masse de la pièce (kg)
- g = Accélération gravitationnelle (9,81 m/s²)
- a = Accélération du mouvement dynamique (m/s2)
- n = Nombre de doigts (n=2 pour la pince à deux doigts ; n=3 pour la pince à trois doigts)
- μ = Coefficient de frottement
- S = Facteur de sécurité
Si la conception de votre doigt et la méthode de préhension de l'objet ne se limitent pas à un simple maintien par friction, une formule de force de préhension différente peut s'avérer nécessaire.
Coefficient de frottement
Vous trouverez ci-dessous un tableau des coefficients de frottement de matériaux courants. Toutefois, ces chiffres constituent un premier point de repère, car ils seront différents pour chaque application et doivent être vérifiés.
| Matériau de la pièce | Matériau de la mâchoire | Coefficient de frottement μ |
| Acier | Acier | 0.25 |
| Acier | Aluminum | 0.35 |
| Acier | Plastique | 0.50 |
| Aluminum | Aluminum | 0.49 |
| Aluminum | Plastique | 0.70 |
| Plastique | Plastique | 1 |
Facteur de sécurité
Il s'agit simplement d'une recommandation et le facteur de sécurité pour votre application particulière peut être différent :
- 2 - pour une utilisation normale
- 3 - pour un mouvement dans plusieurs directions
- 4 - pour les chocs, les accélérations ou décélérations rapides
Options de montage
Les trous de fixation se trouvent sur le fond, le côté et l'avant de la pince et offrent des options de montage sûres. Dans la figure 6 ci-dessous : 1, 2 et 3 représentent les trous de fixation. En fonction de l'application, il est possible de choisir l'un ou l'autre côté pour le montage. Le numéro 4 représente les ports aériens.
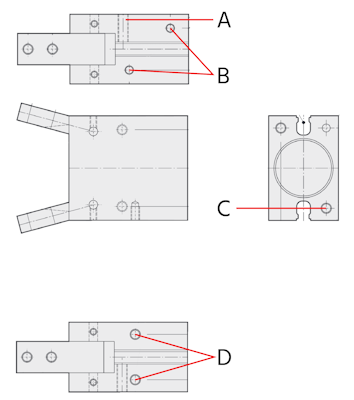
Figure 6 : Options de montage pour le préhenseur angulaire à 2 doigts : 1, 2, 3 : trous de montage et 4 : orifice d'air
Capteurs
Des capteurs peuvent être installés à côté des pinces pneumatiques pour surveiller et contrôler la position de fonctionnement des doigts. Des capteurs ou des détecteurs de proximité peuvent être installés sur les pinces pneumatiques. Ils peuvent être insérés dans les rainures présentes dans le corps, comme le montre la figure 7. Ces capteurs peuvent détecter la position ouverte ou fermée des doigts. Les capteurs de proximité peuvent détecter la proximité en détectant l'objet et en renvoyant l'information au contrôleur.
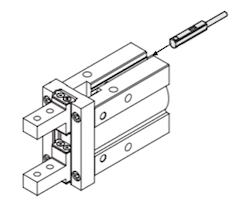
Figure 7 : Installation de l'interrupteur du capteur
Critères de sélection
- Force de préhension : La force de préhension effective peut être calculée à l'aide de la formule présentée dans cet article.
- Poids de la pièce : La force de préhension doit pouvoir supporter le poids de la pièce pendant l'opération.
- Pression d'air : La pression atmosphérique doit être prise en compte car elle a un effet direct sur la force de préhension et influence le dimensionnement de la pince.
- Configuration de la pièce à usiner : La forme de la pièce à usiner permet de déterminer s'il est possible d'utiliser des pinces à 2 ou 3 doigts. Les pinces à 2 doigts sont couramment utilisées et peuvent être utilisées pour une grande variété d'objets. Les pinces à 3 doigts conviennent aux objets ronds ou cylindriques.
- Type de pince : La pince peut avoir une prise externe ou interne en fonction de la pièce à travailler.
- L'environnement : Les pinces pneumatiques doivent être sélectionnées en fonction de l'environnement de travail. Les pinces conçues pour des environnements propres peuvent tomber en panne dans des environnements difficiles.
Applications
Les pinces pneumatiques sont couramment utilisées dans les industries suivantes :
- Robotique
- Fabrication de dispositifs médicaux
- Industrie pharmaceutique et biotechnologique
- Moulage et injection de matières plastiques
- Traitement en laboratoire
- Automatisation





